
ROBOTICA

¿Que es la robotica?
Es lo relacionado con máquinas que tienen características del ser humano y hacen referencia a robots que conocen de la ciencia ficción y de la industria cinematográfica. La robótica es una ciencia o rama de la tecnología, que estudia el análisis, diseño, construcción y aplicación de robots, los cuales, son capaces de desempeñar tareas realizadas por el ser humano.
caracteristicas de la robotica:
- Grados de Libertad: Es el número de parámetros que es preciso conocer para determinar la posición del robot, es decir, los movimientos básicos independientes que posicionan a los elementos del robot en el espacio.
- Precisión: En la continua repetición del posicionamiento de la mano de sujeción de un robot industrial se establece un mínimo de precisión aceptable
- Capacidad de carga: Es el peso en Kilogramos que el robot puede manipular. Si son pesos muy elevados se utilizarán mecanismos hidráulicos.
- Sistemas de coordenadas para los movimientos del robot: son los movimientos y posiciones que se pueden especificar en coordenadas cartesianas, cilíndricas y polares.
- Cartesianas: utiliza las coordenadas x,y,z .
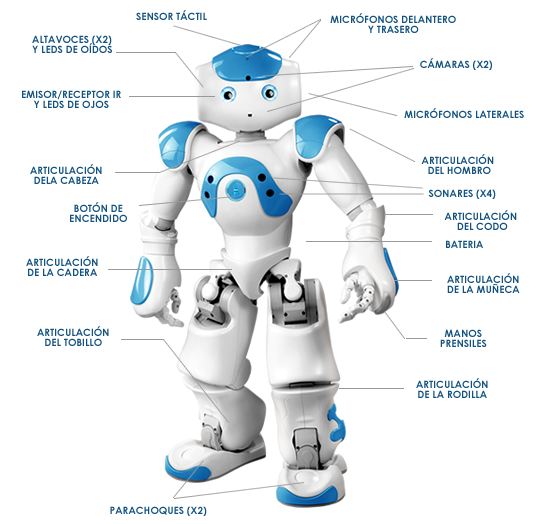
Partes generales de un robot o I.A:
software y programas de robotica:
PROGRAMA LYNXMOTION RIOS RIOS SSC32:
RIOS es un programa de control para los brazos robots, este programa es el mismo que se incluye en los kits completos de brazo robot y esta desarrollado para utilizarse con el circuito de control de servos SCC32 .

RIOS es un programa de control para los brazos robots, este programa es el mismo que se incluye en los kits completos de brazo robot y esta desarrollado para utilizarse con el circuito de control de servos SCC32 .
LYNXMOTION VISUAL SEQUENCER SEQ32:
Es un programa de control de servos especialmente desarrollado para ser utilizado con el circuito SCC32 capaz de controlar hasta 32 servos.
Es un programa de control de servos especialmente desarrollado para ser utilizado con el circuito SCC32 capaz de controlar hasta 32 servos.

BASICO ROBOT MOWAY V2 S300505:
utiliza un el popular PIC16F876 como procesador principal, e incluye múltiples sensores .También posee conexión directa por USB ,especialmente diseñado para la educación, investigación y entretenimiento.
utiliza un el popular PIC16F876 como procesador principal, e incluye múltiples sensores .También posee conexión directa por USB ,especialmente diseñado para la educación, investigación y entretenimiento.

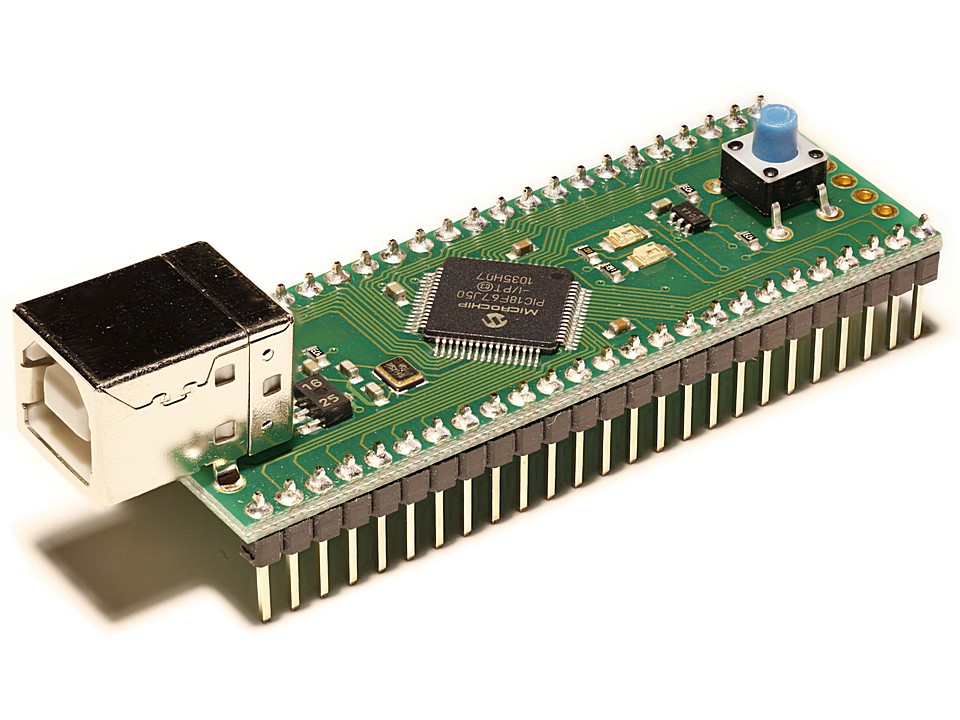
MICROCONTROLADOR PIC18F67J50 CON USB S310442:
Es un circuito microcontrolador de 8 bits con conexión USB, 45 pines de IO, 128 K de flash, 3,9K de RAM y cuenta con su propio regulador de tensión en el propio circuito por lo que no necesita de ningún componente externo para su funcionamiento.
{kind=link}

y por si te interesa mira este tutorial para hacer un robot casero :😊🔧
HISTORIA :
No obstante las limitaciones de las máquinas robóticas actuales, el concepto popular de un robot es que tiene una apariencia humana y que actúa como tal. Este concepto humanoide ha sido inspirado y estimulado por varias narraciones de ciencia ficción.
 Una obra checoslovaca publicada en 1917 por Karel Kapek, denominada Rossum’s Universal Robots, dio lugar al término robot. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, y cuando se tradujo al ingles se convirtió en el término robot. Dicha narración se refiere a un brillante científico llamado Rossum y su hijo, quienes desarrollan una sustancia química que es similar al protoplasma. Utilizan ésta sustancia para fabricar robots, y sus planes consisten en que los robots sirvan a la clase humana de forma obediente para realizar todos los trabajos físicos. Rossum sigue realizando mejoras en el diseñode los robots, elimina órganos y otros elementos innecesarios, y finalmente desarrolla un ser ‘ perfecto ’. El argumento experimenta un giro desagradable cuando los robots perfectos comienzan a no cumplir con su
Una obra checoslovaca publicada en 1917 por Karel Kapek, denominada Rossum’s Universal Robots, dio lugar al término robot. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, y cuando se tradujo al ingles se convirtió en el término robot. Dicha narración se refiere a un brillante científico llamado Rossum y su hijo, quienes desarrollan una sustancia química que es similar al protoplasma. Utilizan ésta sustancia para fabricar robots, y sus planes consisten en que los robots sirvan a la clase humana de forma obediente para realizar todos los trabajos físicos. Rossum sigue realizando mejoras en el diseñode los robots, elimina órganos y otros elementos innecesarios, y finalmente desarrolla un ser ‘ perfecto ’. El argumento experimenta un giro desagradable cuando los robots perfectos comienzan a no cumplir con su
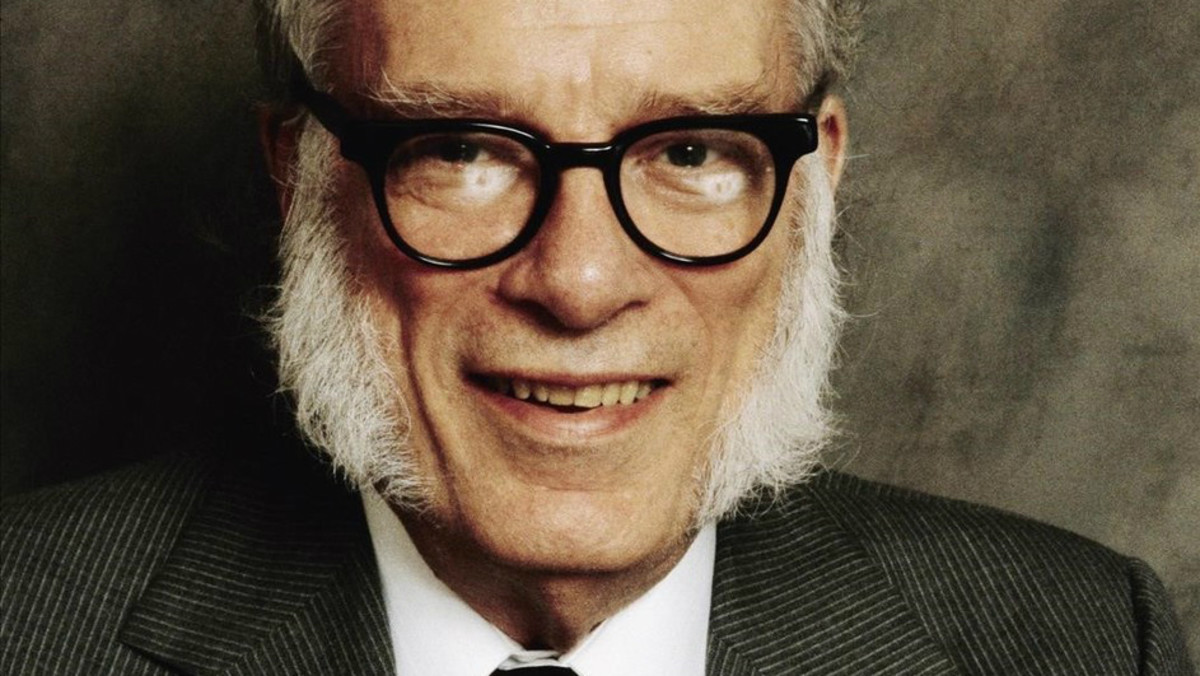
Entre los escritores de ciencia ficción, Isaac Asimov contribuyó con varias narraciones relativas a robots, comenzó en 1939, a él se atribuye el acuñamiento del término Robótica. La imagen de robot que aparece en su obra es el de una máquina bien diseñada y con una seguridad garantizada que actúa de acuerdo con tres principios.
Sofía un gran robot:😃
George Charles Devol :
fue un inventor estadounidense creador del primer robot , Además, junto fundó unimation , la primera empresa de robótica de la historia.

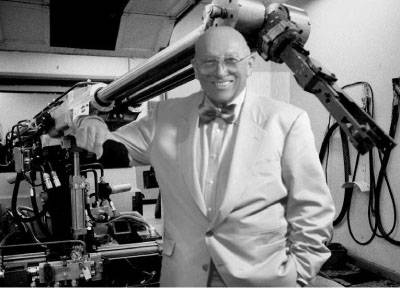
Joseph Frederick Engelberger: fue un físico, ingeniero y emprendedor estadounidense. Conocido como el "Padre de la Robótica Industrial". Con la autorización de la patente concedida al inventor George Devol.
Alan Turing Alan Turing publica Computing Machinery propone una prueba para determinar si una maquina ha podido pensar por si misma . Desde entonces cada año un concurso se lleva a cabo entre varios desarrolladores de software para determinar lo cerca que han llegado a la maquina de turing verdadera.

Victor Scheinman Victor Scheinman, un estudiante de ingeniería mecánica que trabajaba en el laboratorio de inteligencia artificial de stanford . Fue la primera, el brazo de éxito controlado por una computadora, para 1979 el stanford arm podría armar una bomba de agua de Ford Modelo T guiándose de sensores ópticos o de contacto.

Isaac Asimov fue un escritor y profesor de bioquímica en la facultad de medicina de la Universidad de Boston de origen ruso, nacionalizado estadounidense, conocido por ser el creador de las leyes de la robotica.
Las leyes de la robotica:
- Un robot no puede hacer daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la primera Ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la primera o la segunda Ley.
No hay comentarios:
Publicar un comentario